![Как работает электродвигатель [для чайников]](https://raznicynet.com/wp-content/uploads/9/0/b/90b93d17335748ba6fdf570c996a7709.jpeg)
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Система трехфазного тока
Пример HTML-страницы
Техническое значение имеет применение системы трехфазного переменного тока в качестве системы трехфазного тока, основной особенностью которой является то, что сумма всех напряжений и токов всегда равна нулю.
Электрические цепи называются фазами т. Совокупность электрических цепей, в которых напряжения одной частоты оказывают воздействие и имеют фазовый, сдвиг называются многофазными системами. Многофазная система состоит из ветвей обмотки. В многофазной системе может быть п = 3 симметричных систем (рис. «Симметричные системы» ). Во всех симметричных системах — за исключением нулевой системы — сумма всех векторов равна нулю. При количестве фаз т получаем п симметричных систем в зависимости от угла сдвига фаз а:
а = 2π n/m
Задача обмоток — создание вращающегося поля. Асинхронные двигатели имеют такую же конструкцию статора. В воздушном зазоре должно создаваться магнитное поле с постоянной амплитудой, вращающееся с постоянной угловой скоростью. Чтобы создать это поле, временные положения фаз токов должны совпадать с пространственными положениями соответствующих ветвей. У простой симметричной системы (п = 1) с т = 3 три ветви (обозначаемые как U, V и W) и, следовательно, обмотки должны быть равномерно распределены по окружности. На рис. «Обмотка двухполюсного двигателя с одной парой полюсов на каждую ветвь» показано расположение обмотки с тремя ветвями, с одной катушкой на каждую пару полюсов и ветвь. Схемы соединений фаз регламентируются стандартом DIN EN 60034, часть 8.
Создание вращающегося поля
Чтобы создать вращающееся поле в случае с простой симметричной системой (п = 1) с количеством ветвей т = 3, ветви должны быть геометрически смещены на электрически эффективный угол:
аеI = 360°·1/3 = 120°.
При одной катушке на каждую пару полюсов и ветвь создаваемое магнитное поле вращается против часовой стрелки, при этом «индикаторная полоска», смещающаяся вправо на рисунке а, «Создание вращающегося поля с одной катушкой на ветвь» (при а = 90°), показывает ток фазы в каждой из ветвей на рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь» в направлении магнитного потока. Расположение образует пару полюсов. Соответствующие магнитные потоки проходят вертикально к плоскости ветвей обмотки (рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь»).
Поток ФRes (рис. с, «Создание вращающегося поля с одной катушкой на ветвь»), получаемый из трех ветвей, а также его направление достигаются геометрическим сложением трех отдельных потоков ФU, ФV И ФW.
Продвижение индикаторной полоски на угол а = 180° приводит к реверсированию направления тока в ветви W и, следовательно, к дальнейшему повороту созданного поля ФRes вправо (рис. «Создание вращающегося поля с одной катушкой на ветвь 2»).
При использовании двух катушек на одну ветвь расположение проводников «удваивается». Если обмотка должна образовывать две пары полюсов (р = 2), то обмотки необходимо делить на группы (рис. «Обмотка с двумя парами полюсов на каждую ветвь» ). При этом устанавливается механически эффективный угол:
am = 360° · (1/mp) = 60°.
Электрически эффективный угол остается без изменения. В случае как двухполюсного, так и четырехполюсного расположения поле вращается против часовой стрелки (рис. «Создание вращающегося поля с двумя катушками на ветвь» ). Чаcтоту вращения поля:
Пример HTML-страницы
nd = fn/p
можно вычислить на основании частоты в линии fn и количества пар полюсов р. При р = 1 частота вращения поля равна частоте в линии (табл. «Частота вращающихся полей» ).
Вместе с количеством пар полюсов можно вычислить межполюсное расстояние:
τp = dsi /2π
как долю окружности статора, где dsi — внутренний диаметр статора. Он соответствует длине синусоидальной полуволны, которая соответствует распределению индукции поля ротора. В случае с двухполюсным двигателем (р = 1), межполюсное расстояние всегда равно aei = 180° (электрический угол) и совпадает с механическим углом am. Взаимозависимость этих двух углов показывает угол aei=p—am. Чтобы в обмотках наводилось одинаковое напряжение, ветви обмотки должны быть смещены относительно друг друга на угол aei = 120° или 2τp / 3, а структура и количество катушек должны быть одинаковыми. На каждую ветвь приходится одна треть межполюсного расстояния.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Пример HTML-страницы
Конструкция простейшего электродвигателя
 Простейший электродвигатель
Простейший электродвигатель
Опять-таки, отметим, что рассматриваемая конструкция — это далеко не единственный вариант реализации подобных устройств. Однако, большая часть приборов работает именно так и среди бытовых приборов или в транспорте вы вряд ли обнаружите что-то другое. Поэтому, рассмотрим простейшую схему и элементарный вариант реализации прибора.
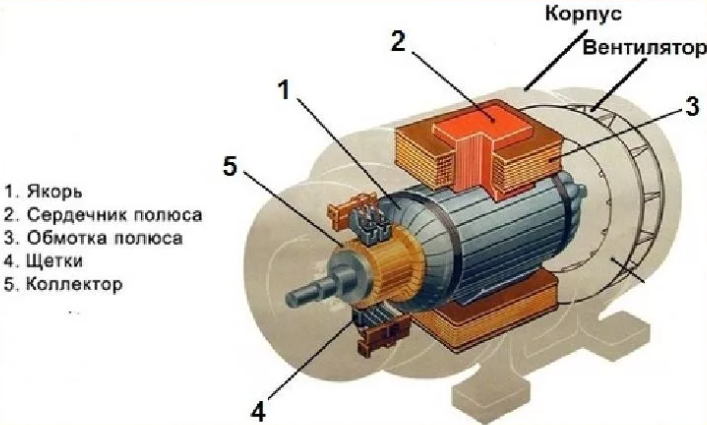
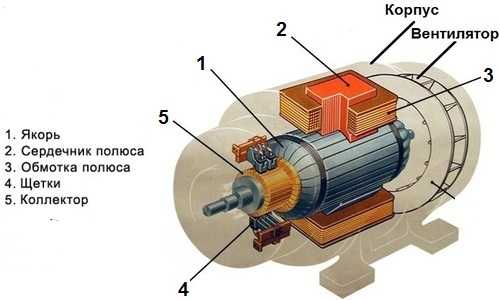
Конструкция самого простого электродвигателя является довольно примитивной. Он состоит из статора и ротора. Всё это убрано в корпус и подсоединяется проводами к источнику электрической энергии. Ещё есть подшипники, но это вещь сугубо механическая и нас сейчас не особенно интересует.
Части двигателя
Статор — это неподвижная часть. Преимущественно неподвижная часть представлена постоянными магнитами. Но бывает и обратный вариант, когда на статоре выполнена обмотка. Различие обусловлено тем, в сети какого типа работает двигатель — постоянного или переменного тока.



Ротор — это подвижная часть, которая, как правило является якорем, а на нем выполнена обмотка. К ротору подходят щётки, на которые подается электрический ток.
Щетки подключаются проводами к источнику питания. Именно они «передают электричество». Но щетки есть не во всех конструкциях двигателей.
Вся конструкция смонтирована в корпус и в закрытом виде представляет собой готовый к работе силовой агрегат. Иногда на ротор двигателя ещё добавляется крыльчатка вентилятора, которая обеспечивает циркуляцию воздуха через агрегат и его дополнительное охлаждение. Так обычно монтируются двигатели постоянного тока.
На валу двигателя мы получаем крутящий момент, который прекрасно можно использовать для своих нужд. Например, передать его посредством зубчатой передачи на редуктор или использовать непосредственно для получения полезной работы (как в вентиляторе дома).
Женщина доила корову, а воде отражалось всё наоборот. Такое может быть и с конструкцией электродвигателя. Тогда намотка там будет на статоре, вместо ротора. Это уже будут двигатели переменного тока. Сам же ротор будет выполнен или из постоянных магнитов, или выглядеть как короткозамкнутая клетка (её ещё именуют беличье колесо).
Бывает также, что и статор, и ротор электродвигателя представляют собой обмотки. Тогда картина незначительно меняется. Правда смысл всё равно сохраняется прежним. Про принципы конструирования таких машин мы поговорим чуть позже.
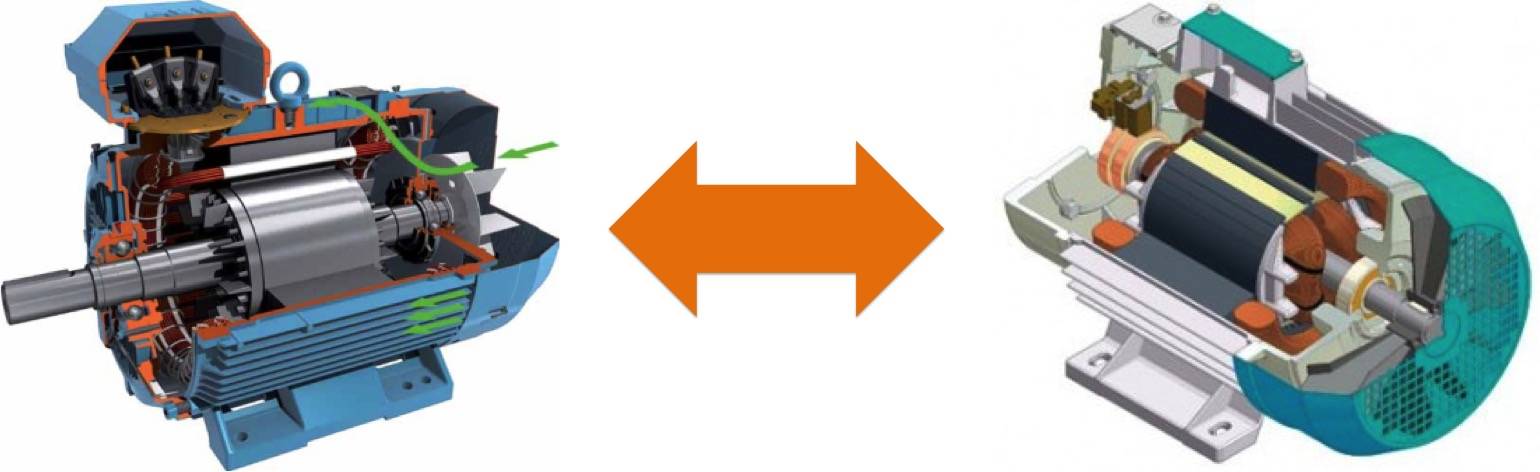
Суть отличия асинхронного и синхронного двигателя
Внешний вид двух устройств может быть неотличим. Главные различия заключаются исключительно в роторе.
Асинхронный двигатель не требует дополнительной подпитки током. А в синхронном устройстве нужна обмотка возбуждения, которая снабжается собственным питанием. Статоры же обоих устройств будут делать абсолютно одинаковое дело: производить магнитное поле с функцией вращения.
Также стоит иметь в виду, что синхронные двигатели стабильнее: если требуется постоянная работа, которая не зависит от нагрузки, то надо выбрать именно синхронный вариант. Проще говоря, такие устройства относительно более востребованы, потому что не дают никаких «сюрпризов» и работают неизменно, мощность одинакова всегда и при любых условиях. Это главное отличие, которое стоит знать непрофессионалу.
Информационная табличка на двигателе (шильдик)
Полную и достоверную информацию о двигателе можно узнать, если уметь «читать» шильдик. Точнее то, что на нем написано. Начнем описание шильдика рассматриваемого двигателя сверху вниз.
Далее построчно:
- Название двигателя. Значок слева – эмблема завода-изготовителя, справа – знак качества СССР.
- Слева: тип двигателя – в этом наборе букв и цифр кодировалась технологическая информация. В кодировку могли включить данные о: количестве катушек в одной обмотке; количество витков провода в одной катушке; скольким числом проводов намотаны катушки; тип лака, примененного для пропитки и т.д. Справа: заводской номер двигателя.
- Слева направо: количество рабочих фаз; частота рабочего напряжения (Гц); мощность двигателя (W); cos φ – коэффициент мощности тока (параметр показывает, какое количество тока, взятого из сети, используется по назначению). Чем больше мощность, тем выше этот параметр.
- Число оборотов в минуту вала двигателя; характеристики статора – по каким схемам можно соединять обмотки (треугольник или звезда); величина(ы) рабочего напряжения.
- Ток, потребляемый двигателем, соответствующий каждой схеме соединения обмоток (в данном случае — 2,3 А при соединении «треугольником» и 1,33 А – «звездой»); коэффициент полезного действия (КПД), степень пыле- влагозащиты (IP44).
- ГОСТ СССР, по которому сделан двигатель; класс изоляции, режим S1. Режим S1 означает, что это постоянный режим работы. В таком режиме двигатель может оставаться включенным в работу на длительное время.
- Страна-производитель двигателя.
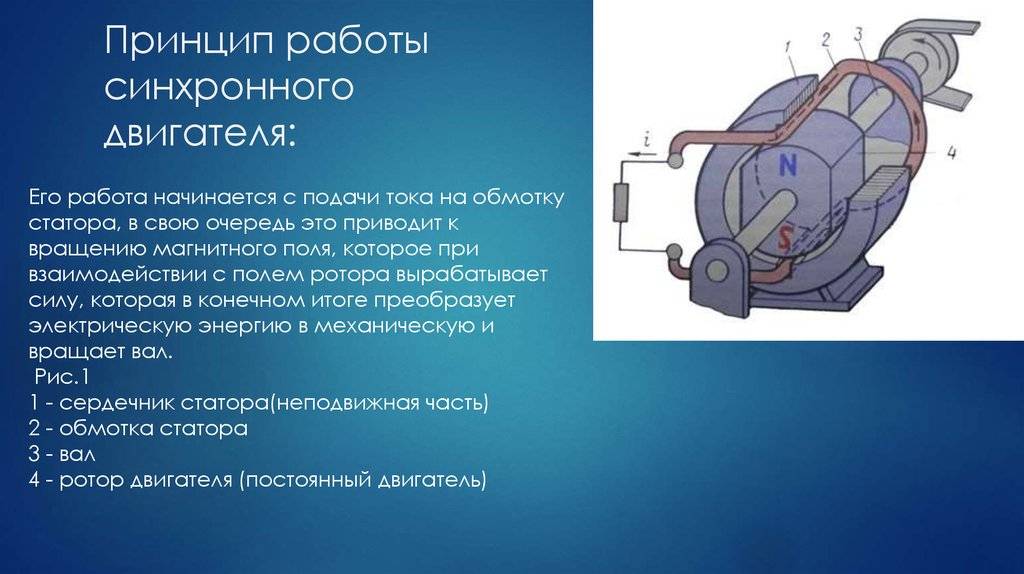
Объяснение принципа работы синхронного электродвигателя для «чайников»
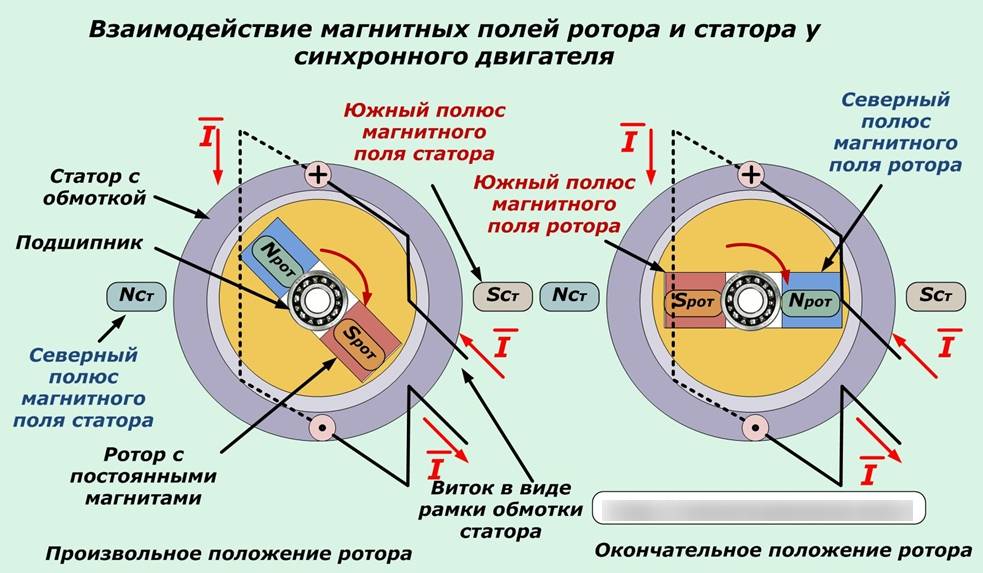
С детства мы помним, что два магнита, если их приблизить друг к другу, в одном случае притягиваются, а в другом отталкиваются. Происходит это, в зависимости от того, что какими сторонами магнитов мы их соединяем, разноимённые полюса притягиваются, а одноимённые отталкиваются. Это – постоянные магниты, у которых магнитное поле присутствует постоянно. Существуют и переменные магниты.
В школьном учебнике по физике есть рисунок, где изображён электромагнит в виде подковы и рамка с полукольцами на концах, которая расположена между его полюсами.
При расположении рамки в горизонтальном положении в пространстве между полюсами магнитов, из-за того, что магнит притягивает разноимённые полюса и отталкивает одноимённые, на рамку подаётся ток, одинакового знака. Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя!
Итак, примитивный синхронный электродвигатель работает, когда на рамку подаётся ток. У настоящего синхронного электродвигателя, роль рамки выполняет ротор с катушками проводов, называемых обмотками, на которые подаётся ток (они служат источниками электромагнитного поля). А роль подковообразного магнита выполняет статор, изготовленный либо из набора постоянных магнитов, либо тоже из катушек проводов (обмоток), которые, при подаче тока являются также источниками электромагнитного поля.
Ротор синхронного электродвигателя будет вращаться с такой же частотой, с какой меняется ток, подаваемый на клеммы обмотки, т.е. синхронно. Отсюда название этого электродвигателя.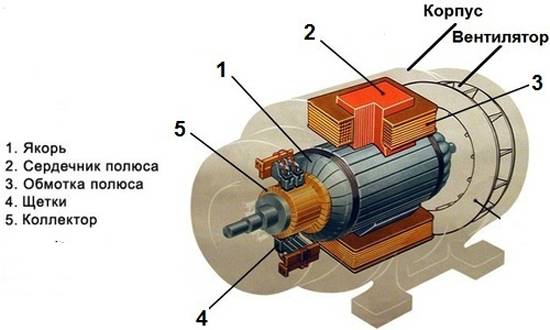
Преимущества и недостатки асинхронных двигателей
Преимущества асинхронных двигателей:
1. Простота и надежность конструкции. Асинхронные двигатели не имеют коллектора и щеток, что упрощает их конструкцию и снижает риск поломки.
2. Экономичность. Асинхронные двигатели имеют высокую КПД и могут работать в широком диапазоне нагрузок, что позволяет снизить энергопотребление и экономить ресурсы.
3. Низкий уровень шума и вибрации. Благодаря отсутствию коллектора и щеток, асинхронные двигатели работают практически бесшумно и снижают уровень вибрации.
4. Широкий диапазон скоростей. Асинхронные двигатели могут работать с различными скоростями, что позволяет их использовать в разных сферах промышленности.
Недостатки асинхронных двигателей:
1. Низкое значение пускового момента. Асинхронные двигатели имеют низкое значение пускового момента, что может ограничивать их использование для тяжелых нагрузок.
2. Использование реактивной энергии. Асинхронные двигатели потребляют реактивную энергию, что может приводить к дополнительным затратам на оплату электроэнергии.
3. Высокая чувствительность к перегрузкам. Асинхронные двигатели могут быть чувствительны к перегрузкам, поэтому их необходимо правильно выбирать для определенных нагрузок.
4. Ограниченный диапазон регулирования скорости. В отличие от некоторых других типов двигателей, асинхронные двигатели имеют ограниченный диапазон регулирования скорости.
В целом, асинхронные двигатели являются важным элементом промышленности и сферы энергетики, предоставляя надежный и экономичный источник энергии для различных систем и оборудования.
Синхронный электродвигатель
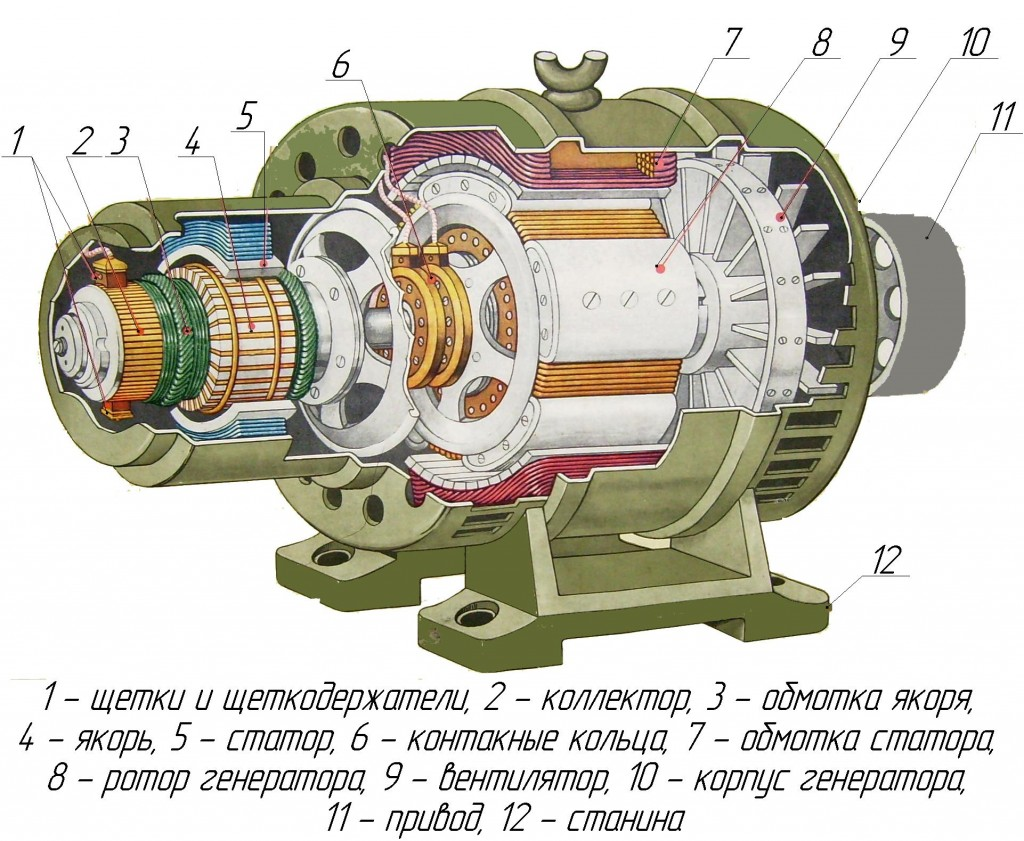
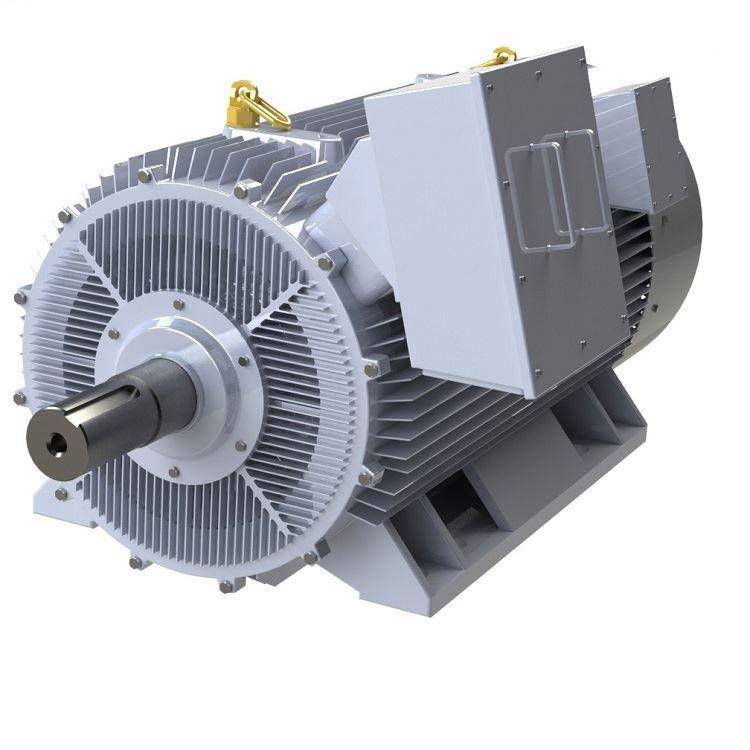
Итак, синхронный электродвигатель – это мотор с постоянной скоростью вращения ротора, плюс возможность регулировать эту скорость. Устройство синхронного мотора достаточно сложное. Чтобы в нем разобраться, необходимо рассмотреть фотографию ниже.

![Как работает электродвигатель [для чайников]](https://raznicynet.com/wp-content/uploads/b/8/c/b8cd62771af60bbd34ff411e6e328b41.jpeg)


Здесь четко показано, что обмотки двигателя располагаются на якоре или роторе агрегата. Концы обмоток выведены и закреплены на токосъемное кольцо, а, точнее, к его секторам. Сам же ток подается на это же кольцо только через графитовые щетки, которые подключены к питающей сети.
У двигателя этой модели больше уязвимых мест, чем у асинхронной.
- Снашиваются графитные щетки.
- Плохой контакт между токосъемным кольцом и щетками за счет ослабления пружины, которая прижимает последние к кольцу (коллектору).
- Изнашиваются подшипники.
- Образование грязевого налета на поверхности токосъемного кольца.
Теперь переходим к другой позиции – принцип работы синхронного электродвигателя. Вращающийся момент внутри мотора образуется за счет взаимодействия магнитного поля, которое образуется в обмотках возбуждения, и тока, проходящего по якорю агрегата. Но тут есть один момент – изменяющееся направление тока (переменного) будет менять и направление вращения магнитного поля двигателя. Правда, смена вращения будет меняться и в корпусе аппарата, и на якоре одновременно. Вот почему вращение ротора мотора всегда происходит с одинаковой скоростью.
Именно поэтому изменить эту величину можно лишь тем, если изменить напряжение подаваемой на щетки электроэнергии. Вспомните пылесосы, где всасываемую мощность изменяют переключателем, который просто соединен с реостатом. А мощность пылесоса зависит от скорости вращения вала крыльчатки, то есть вала электродвигателя. Чем больше скорость, тем больше мощность всасывания.
Но синхронные электродвигатели в промышленности своего основного места не нашли. Здесь в основном используются асинхронные модели.
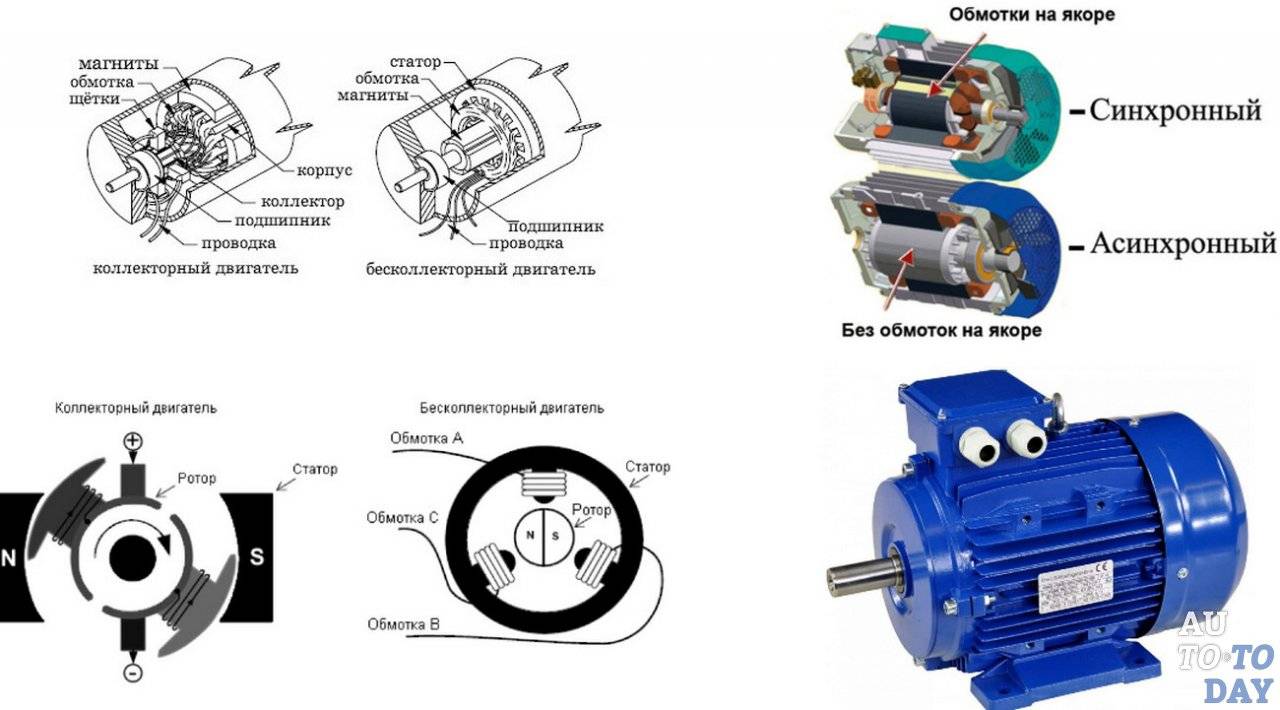
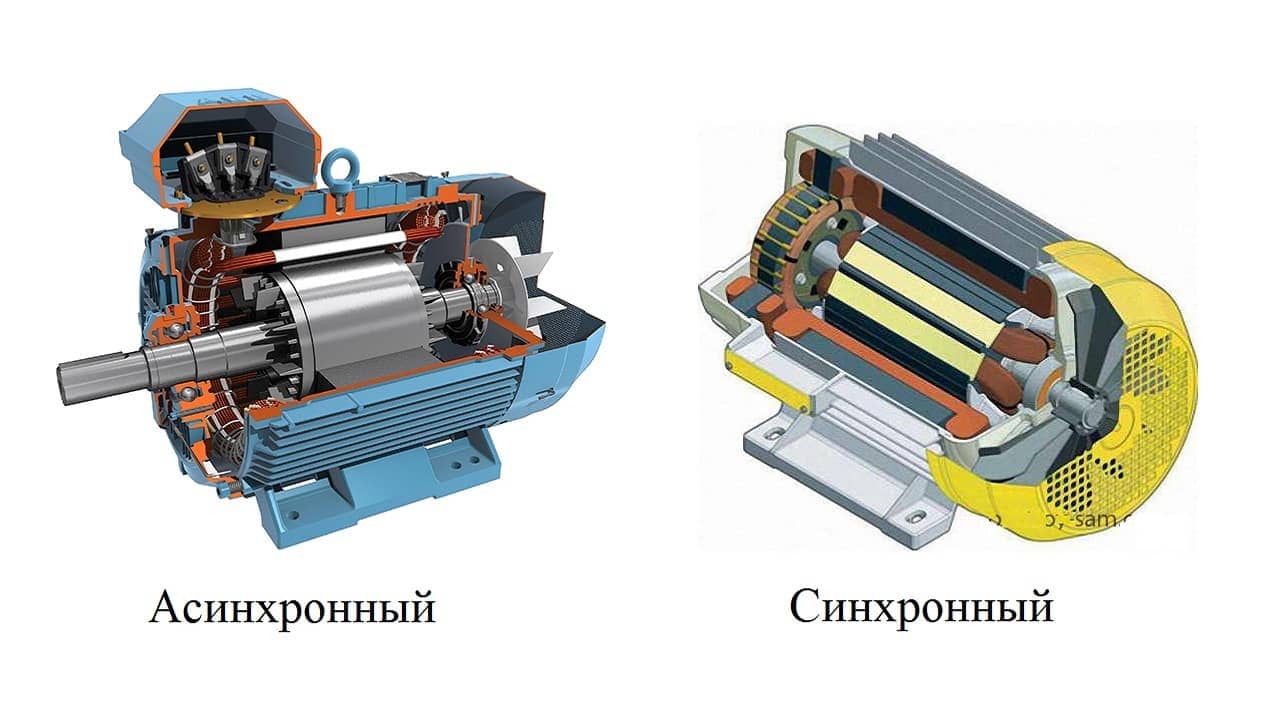
Чем отличается синхронный двигатель от асинхронного?
Основная задача электродвигателя — преобразовывать электрическую энергию в механическую. Сегодня электродвигатели изготавливаются как постоянного, так и переменного тока. Среди двигателей переменного тока лидируют асинхронные и синхронные двигатели. Асинхронные двигатели малой и средней мощности относятся к группе наиболее часто используемых электродвигателей. Они широко используются как в промышленности, так и в бытовой технике.
В промышленности чаще всего используются асинхронные двигатели трехфазные. Они используются, например, в энергетике — в качестве приводов для собственных нужд электростанций, в строительстве, на транспорте, в коммунальном хозяйстве — в качестве приводов насосов водоснабжения и т. д.
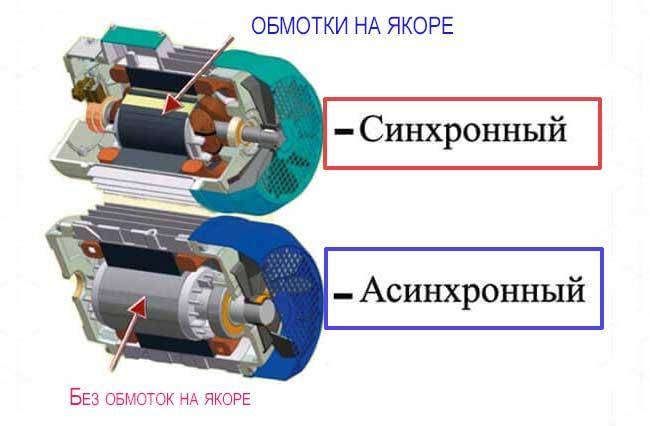
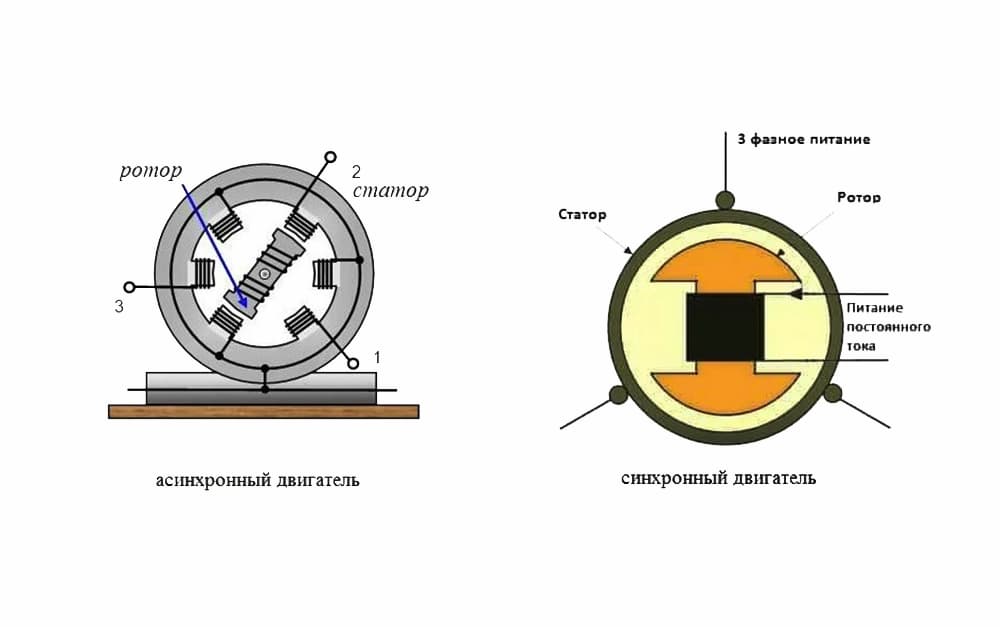
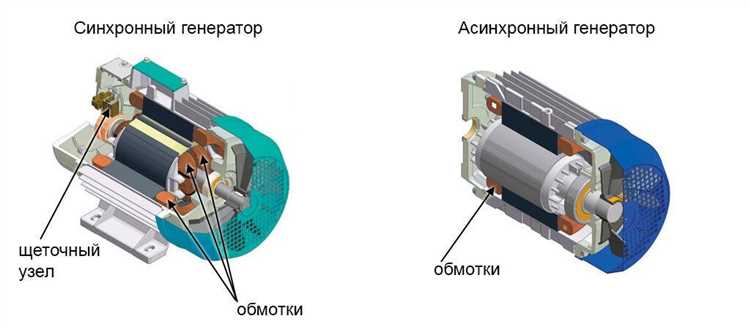
Отличие асинхронного электродвигателя от синхронного

С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. У обоих электродвигателей есть неподвижный статор, состоящий из обмоток (катушек), которые уложены в пазы сердечника, набранного из пластин, выполненных из электротехнической стали, и подвижный ротор. Кроме того, функция этих типов электродвигателей одна и та же — создание вращающегося магнитного поля статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора. И поэтому у асинхронного двигателя есть такой параметр — как СКОЛЬЖЕНИЕ — разность скоростей вращения ротора и вращающегося магнитного поля в статоре. У синхронного электродвигателя частота вращения ротора всегда равна частоте вращения электромагнитного поля.
У этих двух типов двигателей разные области применения: синхронные электродвигатели отличаются гораздо большей мощностью и полезной нагрузкой, но они дороже и сложней. И поэтому асинхронные двигатели востребованы там, где достаточно их характеристик, ведь они дешевле и проще в изготовлении.
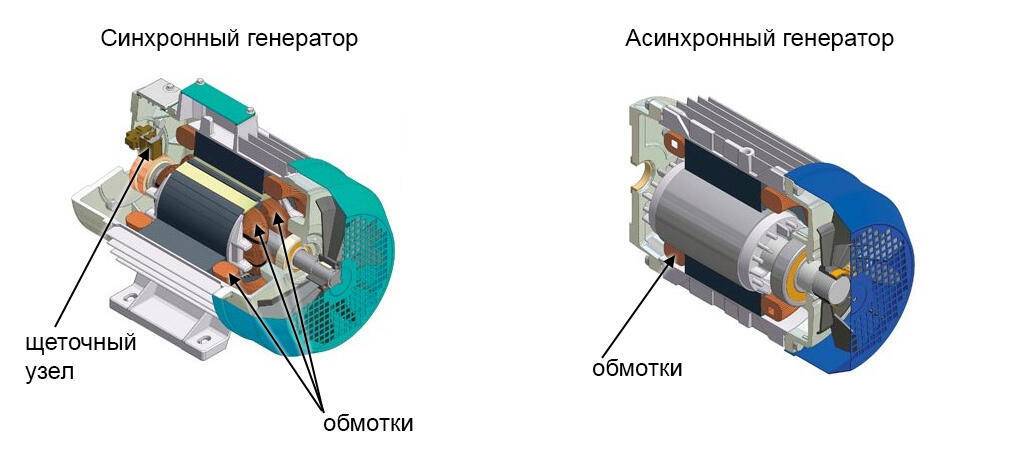
Синхронные двигатели
 |  |  |
Синхронные двигатели имеют довольно сложную конструкцию, обусловленную наличием щеточного узла. Кроме того, для их работы требуется дополнительный источник постоянного тока. Еще одним недостатком является невозможность их эксплуатации в условиях частых пусков и остановов. Однако все это компенсируется большой мощностью, высоким КПД, устойчивостью к перепадам напряжения в питающей сети и стабильной частотой вращения вала, вне зависимости от величины нагрузки на него.
Синхронные электрические машины рентабельны при мощностях свыше 100 кВт и основное применение находят для вращения мощных вентиляторов, на различных металлургических производствах, для привода насосов, которые обладают не только значительной мощностью, но и долгим режимом функционирования т.д.
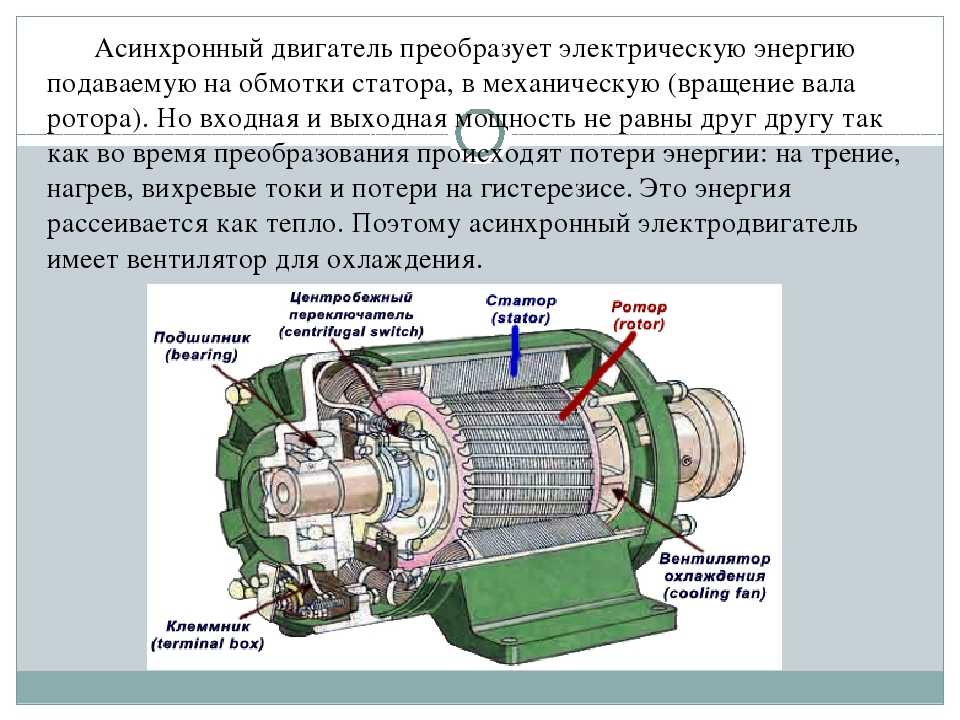
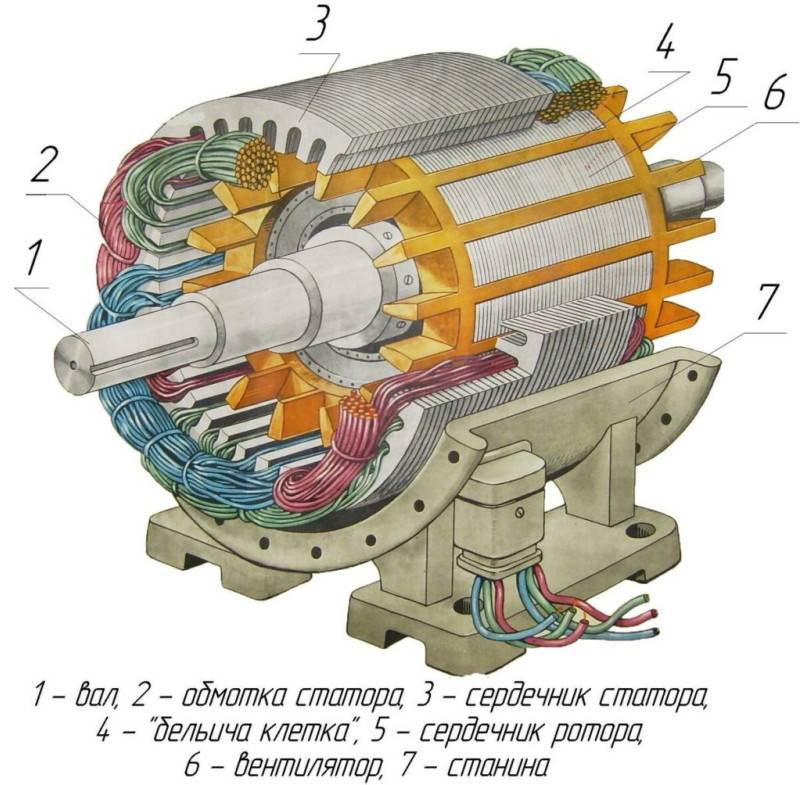
Асинхронный двигатель
 |  |
Асинхронный двигатель в отличие от синхронных машин более чувствителен к колебаниям напряжения и не может сохранять номинальную скорость вращения, при увеличении нагрузки. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска. Но простота конструкции, длительный срок эксплуатации, универсальность применения, способность работать в режиме частых включений и остановок делают эти машины наиболее распространенными в промышленном и бытовом секторе.
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
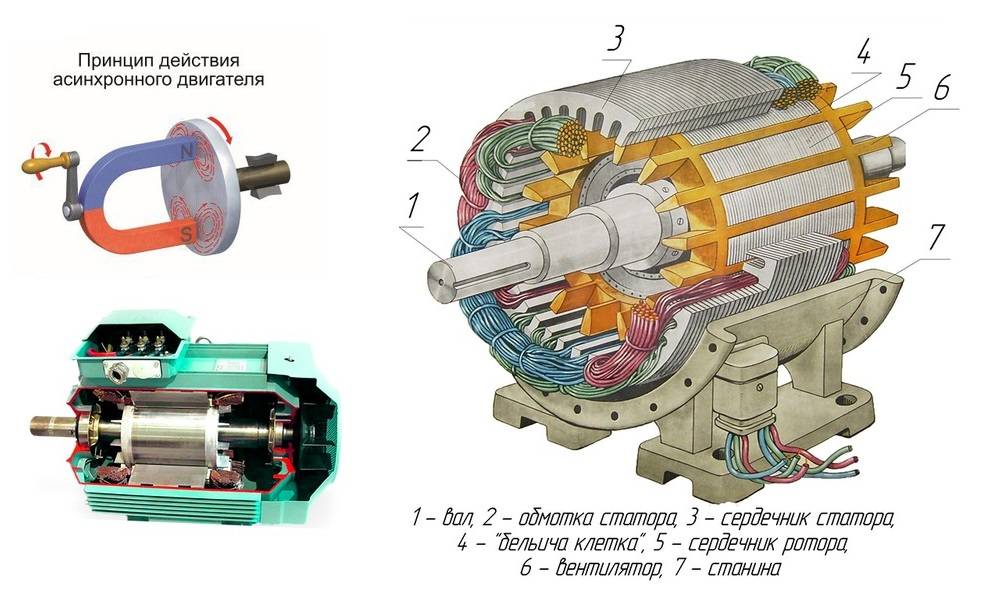
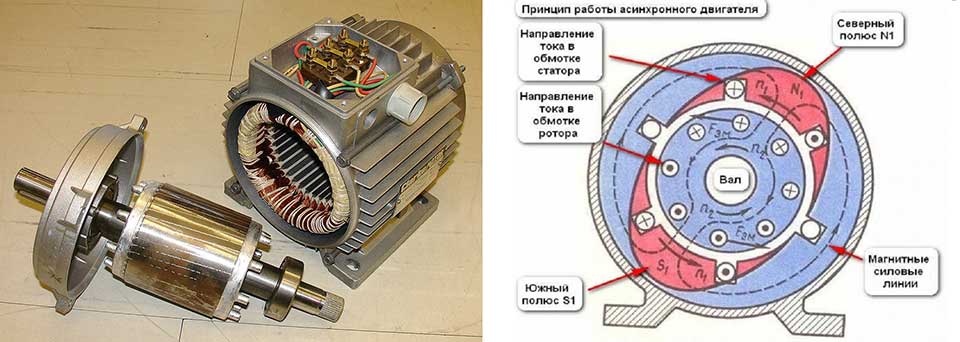
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.


Положительные качества
Как и любое техническое устройство СД и асинхронные двигатели имеют свои сильные и слабые стороны. Свойства со знаком «плюс» или «минус» обусловлены конструктивными и техническими различиями электрооборудования. Какой двигатель установить для простого или высокоскоростного электропривода напрямую зависит от того, чем отличается синхронный двигатель от асинхронного. В связи с этим выделяют следующие достоинства СД:
- возможность работать как генератор и обеспечивать компенсацию реактивной мощности, вырабатываемой электростанциями; эта способность особенно важна для промышленных предприятий, поскольку синхронный генератор, работая с опережающим током, увеличивает коэффициент мощности электросети, уменьшает нагрузку на трансформаторы, кабели, улучшает качестве электроэнергии и, как результат, способствует лучшей отдаче от асинхронных моторов;
- высокий коэффициент полезного действия порядка 97-98%;
- возможность изменять перегрузочные параметры посредством разных характеристик тока, питающего роторный механизм;
- низкий порог чувствительности к перепадам напряжения в электросети, что является важным отличием от асинхронных электромоторов;
- высокая надежность работы благодаря воздушному зазору больших размеров.
АД имеет свои преимущества перед устройством синхронного типа и характеризуются:
- более простой и надежной конструкцией, обусловленной трехфазным принципом подключения и упрощенным конструированием, понятным для чайников;
- способностью запускаться напрямую, в то время как пуск синхронного двигателя с прямым сетевым подключением невозможен;
- экономичным энергопотреблением, что значит снижение эксплуатационных затрат;
- доступной относительно низкой ценой, чем отличаются от СД;
- универсальностью применения, особенно в местах с частотно-регулируемыми электроприводами с обратной связью; в этом случае для вращения асинхронного мотора с требуемыми оборотами устанавливают электронное устройство управления;
- способностью работать от одно- и трехфазной сети, что позволяет использовать этот двигатель в местах с отсутствием развитой инфраструктуры.
Положительным моментом АД также является способность самозапускаться после потери и возобновления электропитания. Этот тип машин лучше и по затратам на обслуживание. При эксплуатации достаточно производить чистку элементов машины от загрязнений, протягивать контакты и лишь спустя полтора десятка лет заменить подшипники в двигателях.
Какой лучше
Итак, в статье были разобраны устройство и принцип действия двух видов электродвигателей. Говорить о том, что какой-то из них лучше, нельзя. Но отметим, что асинхронные модели проще в конструктивном аспекте. Они надежнее в эксплуатации. Если их не перегружать, то срок службы может быть очень длительным. К сожалению, синхронные виды этим похвастаться не могут. Графитовые щетки быстро изнашиваются, им требуется замена. Но если не уследить, и графит сотрется полностью, то металлические держатели щеток начнут истирать токосъемное кольцо. А его выход из строя – это не только полный выход из строя двигателя, это большое количество искр (трение металла о металл) и возможность появления более серьезных неприятностей.
Преимущества использования асинхронного двигателя постоянного тока
Асинхронный двигатель считается одним из самых распространенных электродвигателей. Он широко используется в различных областях промышленности и бытовых устройствах. Его популярность обусловлена рядом преимуществ, которые он предоставляет.
1. Простота конструкции и надежность
Асинхронный двигатель имеет простую конструкцию, что облегчает его проектирование и производство. Он состоит из нескольких основных компонентов, таких как статор, ротор и обмотки. Благодаря этому, асинхронный двигатель обладает высокой надежностью и длительным сроком службы.
2. Высокая эффективность
Асинхронные двигатели постоянного тока обладают высокой эффективностью преобразования электрической энергии в механическую. Они могут работать с высокими коэффициентами мощности, что позволяет значительно снизить энергопотребление и повысить экономичность использования.
3. Плавный пуск и низкие уровни шума
Асинхронный двигатель обладает возможностью плавного пуска, что позволяет избежать больших нагрузок и рывков при старте
Это особенно важно для устройств, требующих точного и мягкого включения. Кроме того, асинхронные двигатели работают с низкими уровнями шума, что является важным качеством для бытовых аппаратов и устройств
4. Простота управления и возможность регулировки скорости
Асинхронные двигатели постоянного тока обладают простотой управления и возможностью регулировки скорости. Это позволяет легко изменять режим работы двигателя в зависимости от требуемых условий и нужд процесса
Благодаря этому, асинхронные двигатели широко применяются в системах автоматизации и регулирования, где важно точное и гибкое управление нагрузкой
В целом, асинхронный двигатель постоянного тока предоставляет ряд преимуществ, делающих его одним из наиболее предпочтительных выборов для многих приложений. Он сочетает в себе простоту конструкции, надежность, высокую эффективность, плавный пуск, низкий уровень шума, простоту управления и возможность регулировки скорости.
